
社区论坛
Community Forum
注:转载自知乎用户张斯俊,原文地址:你有一份强化学习线路图,请查收。(原题:看我如何一文从马可洛夫怼到DPPO)
本文希望用最短的文字,介绍强化学习的入门线路图。从马可洛夫模型到DPPO。
先上线路图,我会逐点解释。
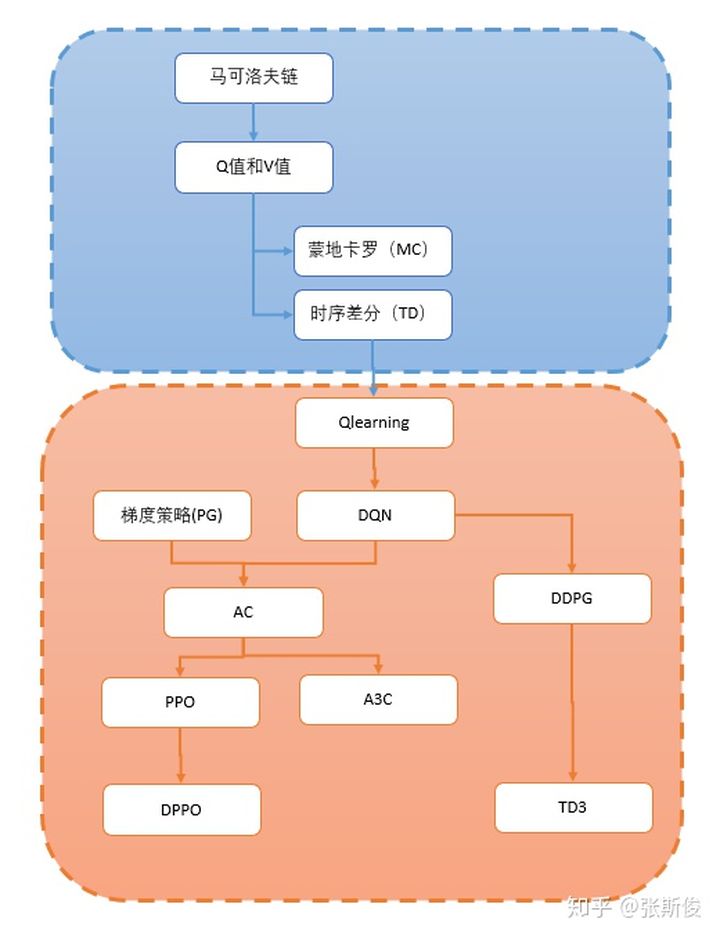
线路图分为两部分:
第一部分是基础概念;
首先我们要弄清楚强化学习到底是干嘛的?它围绕怎样一个问题,而后面所有的所有,都是围绕这个问题的解决方案。
第二部分是深度强化学习的算法;
他们是怎么一直发展的,脉络是怎样的?
我们先来看马可洛夫链。马可洛夫链长这样子:

马可洛夫链描述的是智能体和环境进行互动的过程。简单说:智能体在一个状态(用S代表)下,选择了某个动作(用S代表),进入了另外一个状态,并获得奖励(用R代表)的过程。
所以,我们希望通过让智能体在环境里获取最多的奖励,把智能体训练成我们想要的样子——就是能完成某些特定的任务。
所以,我们马上遇到第一个坑:马尔科夫链,其实应该叫马尔科夫树吧!
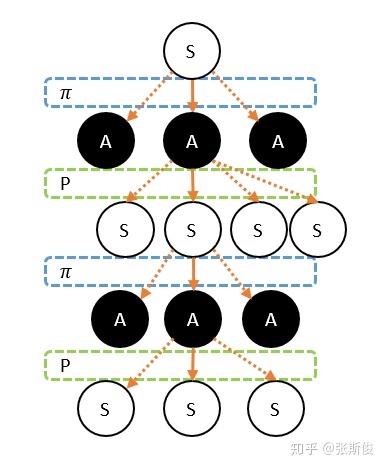
我们看到的链,是因为我们从现在往后看,但如果往前看,是充满不确定性的。
这里的不确定性包括两方面:
策略:智能体的每次选择都不是固定的,而是按照一定的策略分布。这个概率分布我们称为策略,用 表示。
状态转移概率:这个只跟环境有关关系。例如飞行棋的掷骰子游戏,我们执行同样的动作,也有可能进入不同的状态。
于是,我们如果要想让智能体能够获得奖励最大化就面临两个问题。
未来的路很长,我们不能只凭眼前的收获,就马上做决定;我们要考虑未来;
未来的路充满不确定性:我们不能走一次某一条路,就下决定了。
前路长且险,那我们该怎么办呢?
我们需要V和Q。
其实V和Q的意义是类似的,唯一的不同是V是对状态节点的估算,Q是对动作节点的估算。
那估算什么呢?
估算从该节点,一直到最终状态,能够获得的奖励的总和的平均值。
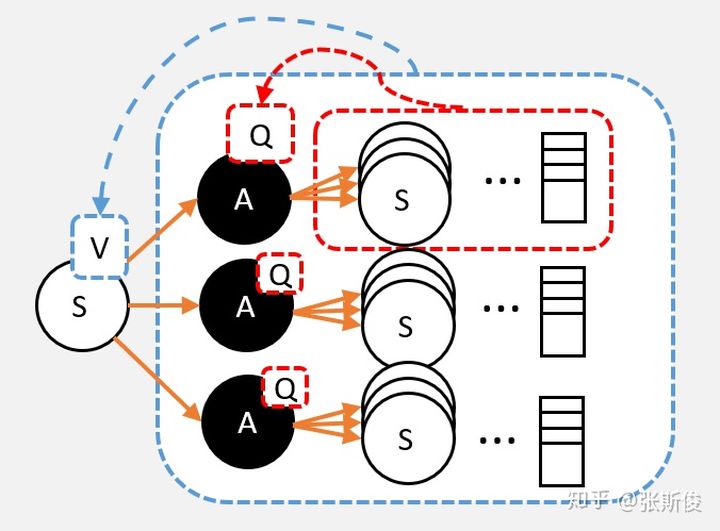
请记着这个意义,后面的所有算法基本都会围绕这个定义。因为,如果智能体已经知道某个动作或者状态 一直到最后状态能够一共获得多少奖励。那智能体选多的那个就完了。
所以用个例子说明:我们用影分身,从某个节点出发,一直到最终节点。每个影分身途径都会获得不同的奖励。那么,平均一个影分身能够获得多少奖励,就是对这个节点的价值的估算。
那怎么估算每个节点的价值呢?
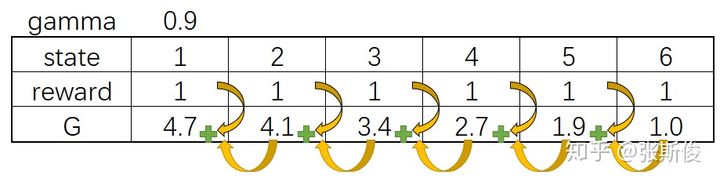
蒙地卡罗会让智能体从某个状态S出发,直到最终状态,然后回过头来给每个节点标记这次的价值G。G代表了某次,智能体在这个节点的价值。
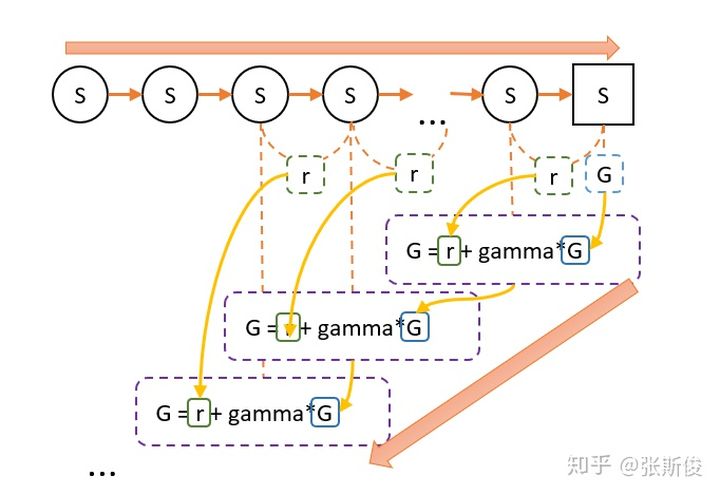
经过多次后,把每个状态的G值进行平均。这就是状态的V值。
但为了方便,我们对平均进行一些优化。于是获得用MC估算V值的公式:
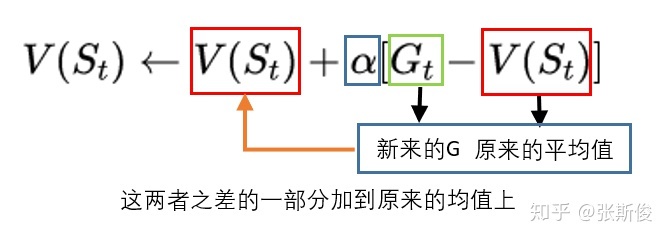
而时序差分是一步一回头。用下一步的估值,估算当前状态的估值。
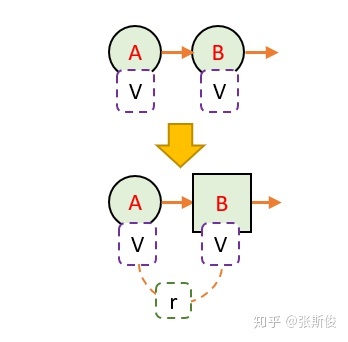
这就相当于,把下一步状态直接当成最终状态。但这个状态它自己包含了这个状态的价值。
因此,我们可以把蒙地卡罗用到的G值,用V(St+1) + r 代替:
我们之前学习了用TD估算V值。但其实我们用TD预估Q值,其实会来得更方便,因为我们要的就是智能体选择动作嘛。
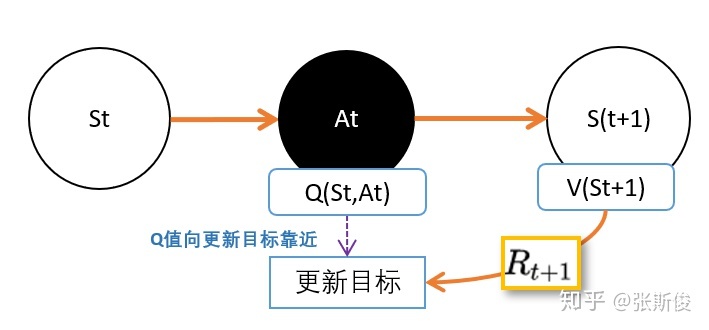
但问题是,如果既要估算V(St+1),又要估算Q(St,At)。就相当麻烦了。能不能都统一成Q值呢?也就是说V(St+1)用一个动作的Q值所代替。
于是便有两种不同的替代方案:Qlearning和SARSA。
先说SARSA,SARSA的想法是,用同一个策略下产生的动作A的Q值替代V(St+1)。如下图:
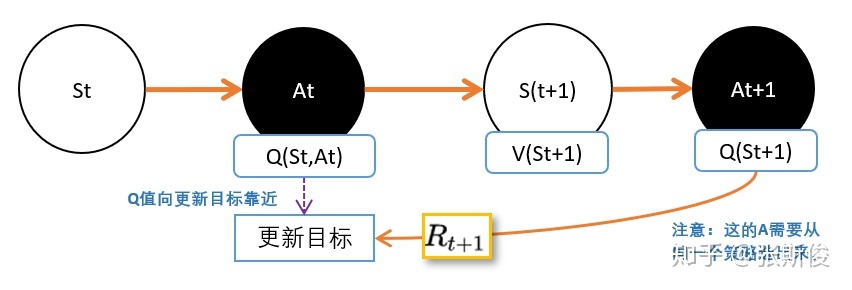
于是有了,SARSA的更新公式。

我们可以和TD估算V值对比一下,几乎是一模一样的,只是把V换成Q。
但我还是建议记得我们上面说的,我们有用Q替代V(St+1)。因为跳过这一步,我们就理解不了Qlearning了。
Qlearning的想法其实也很直观:既然我们的目标是选取最大收益,所以,我们肯定会选择一个能够获得最大Q值的动作。也就是说,在实际选择中,我不可能选择不是最大Q值的动作。所以,我们应该用所有动作的Q值的最大值替代V(St+1)。
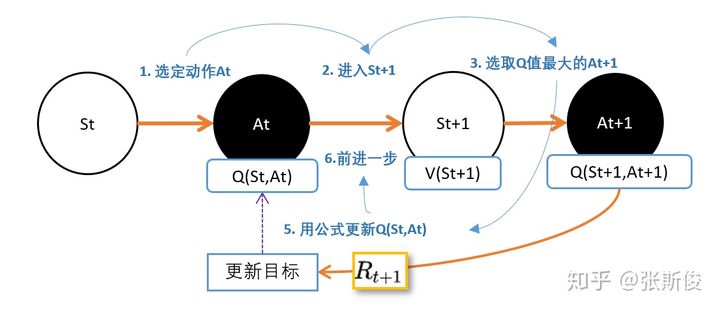

Qlearning公式和SARSA相比,就差那么一个max。
现在我们就结束了第一部分,开始进入深度强化学习的部分了。
为什么深度强化学习这么强,是因为深度强化学习增加了一个很强的武器——深度神经网络。
有人说,深度神经网络很红呀,但我不懂。后面的怎么学?
没关系,如果让我两个字概括,深度神经网络就是一个函数。
函数其实也很简单,就是描述两个东西的对应关系。F(x) = y , 描述的就是x和y之间的关系。
以前的函数,需要我们去精心设计的,要设计,就要描述其中的关系。但有些东西我们明明知道他们有关系,但又不好描述清楚。
例如,手写数字识别,一个正常人写的数字8,我们人类都能认出来。但我们却描述不出来,我们知道是两个圈是8,但有些人的圈明明不闭合,我们也认得出是8...
但深度神经网络这个工具就能自己学会这些关系。它是怎样做的呢?
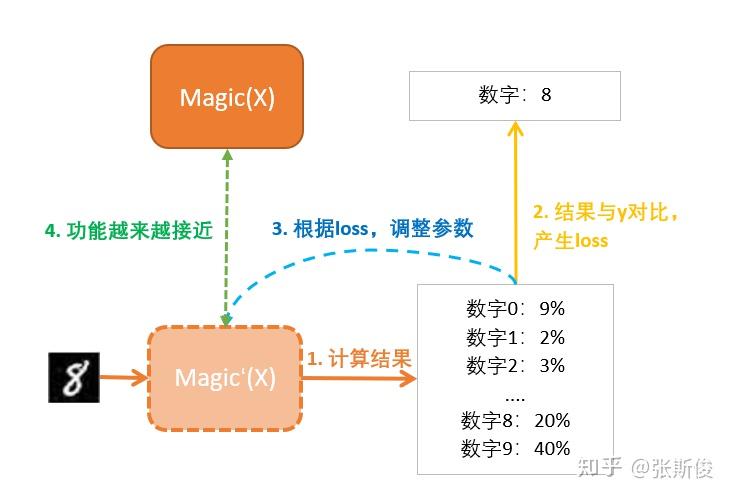
我们要学习一个神奇函数Maigic(),辨别手写数字,也就是输入一张8的图,输出这个数字是什么。
我们先设一个Magic'(X),其中的X就是输入的图片;
计算结果是各个数字的概率。这个判断一开始通常都是错的,但没关系,我们会慢慢纠正它。
纠正就需要有一个目标,没有目标就没有对错了。这里的目标是我们人类给他们标注的,告诉Magic':这玩意儿是数字8
目标和现实的输出总是有一段距离的,这段距离我们称为损失(loss).
我们调整我们Magic'函数的参数,让损失最小化。也就是说,离目标越来越近。
最后你就发现Magci’函数的功能离我们心目中要找的Magci函数越来越近。
DQN = Deep learning + Qleanrning。
Qleanrning有一个问题:只能解决格子类型离散型状态问题,对连续型状态束手无策。
这是因为Qlearning在实做的时候用的是Q表格(Qtable)。表格这玩意儿注定就只能存离散的东西。
但我们刚才说的神经网络,正好就能解决这个问题,因为神经网络是个函数。可以处理连续型的问题。两者一拍即合!
在这我想先给大家一个不够准确,但很有用的理解方式。
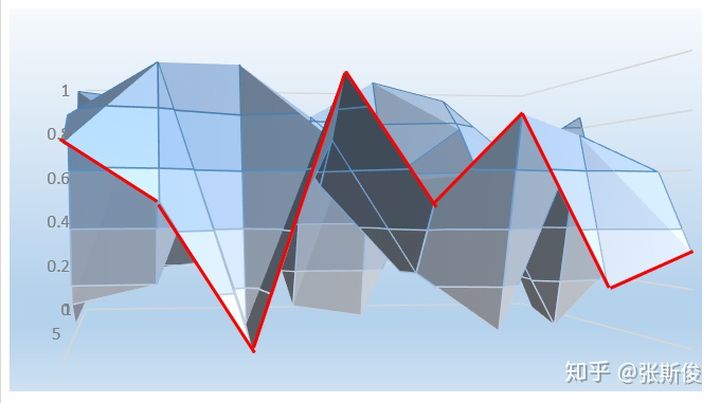
我们用三维图,把Q表格显示出来,长这样子。
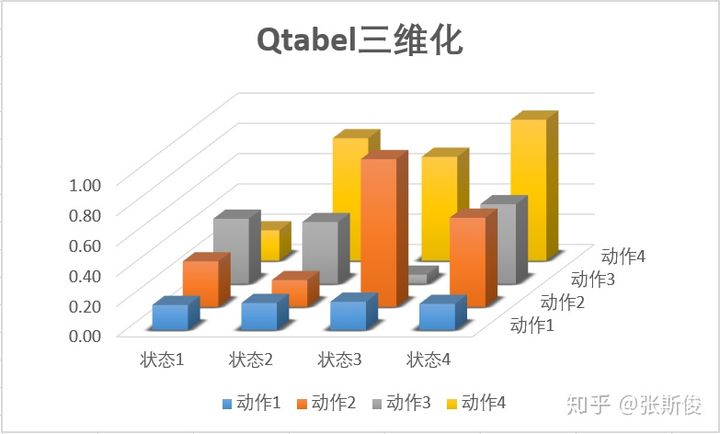
图中描述的就是某个状态下的某个动作,能够取得的Q值的大小。Q越大,柱子越高。
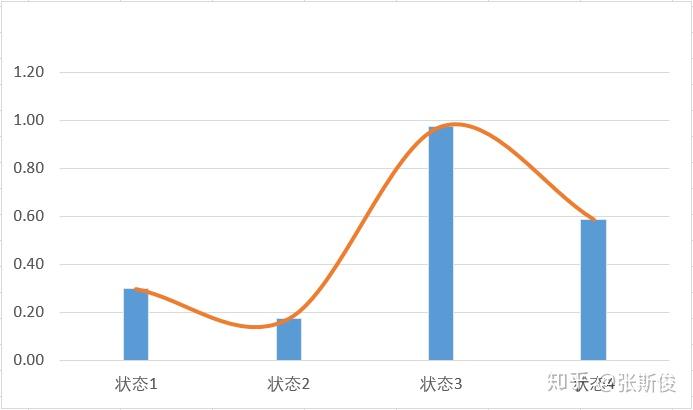
由于状态是连续型的,就相当于我们把状态用线给连起来。这样我们不但可以计算S1,S2,也可以计算状态S1.5了。
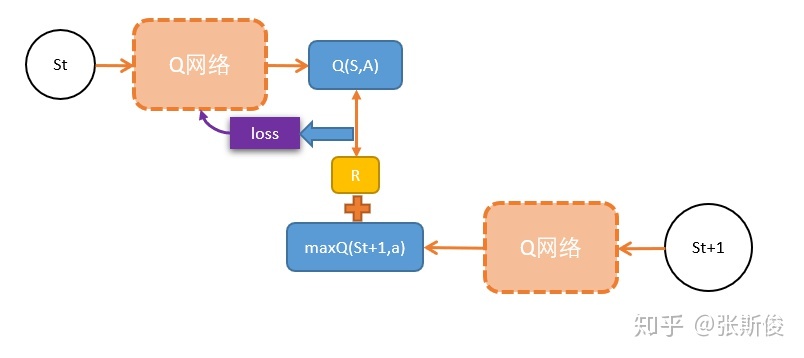
有一个问题,是我们用万能的神经网络的时候,需要解决的。就是更新的目标是什么?网络应该向什么地方优化。
其实,如果你对之前的Qlearning理解够深的话,就知道,我们更新用的是下一状态的Q值+奖励,作为更新的目标。如下图。
DQN有很多变种,这里只提一个Double DQN。主要是为了解决一个问题:DQN对Q的估值通常会过大。
直观地说,你可以这样认为: 我们用的是下一状态中,Q值最大的作为当前状态的估算。下一状态的Q值,以下下状态的最大Q值作为估算...这就有点像大话骰,这个Q值越传播就越大。
那怎么办?用两个网络对Q进行预估,取最小的那个。就相当于,你们尽管吹牛,大的我不要,我要小的。
当然,你会说这都可以?答案就是在试验当中,有奇效。
这就是DoubleDQN的想法。
DQN还有其他的一些变种,例如Dueling DQN。
不知道大家现在有没有留意,其实我们进入一个大坑。
我们现在是把Q值和V值往死里算呀,但实际上,我们并不需要Q值呀,我们需要的是能获得最多的奖励总和呀。
既然现在我们发明出宇宙最强无敌的Magic函数——神经网络。那我们直接用神经网络magic(s)=a不行吗?
恭喜你,这就是PG的基本思想。
PG用的是MC的G值来更新网络。也就是说,PG会让智能体一直走到最后。然后通过回溯计算G值。
如果忘记了,可以看一下MC的专栏文章)
于是得到S - A - G 的数据。这里的G就是对于状态S,选择了A的评分。也就是说, - 如果G值正数,那么表明选择A是正确的,我们希望神经网络输出A的概率增加。(鼓励) - 如果G是负数,那么证明这个选择不正确,我们希望神经网络输出A概率减少。(惩罚) - 而G值的大小,就相当于鼓励和惩罚的力度了。
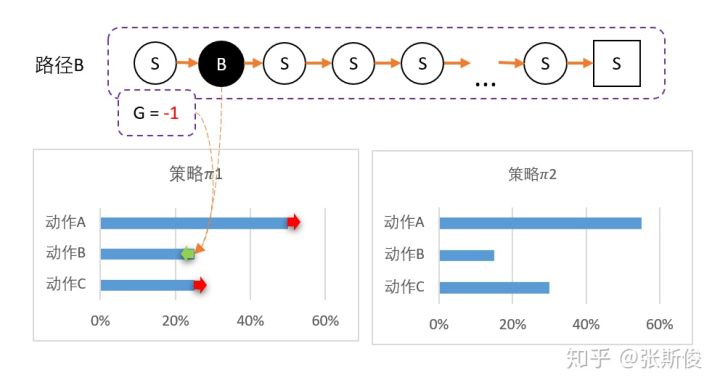
我们分别以ABC三途路径作为例子:
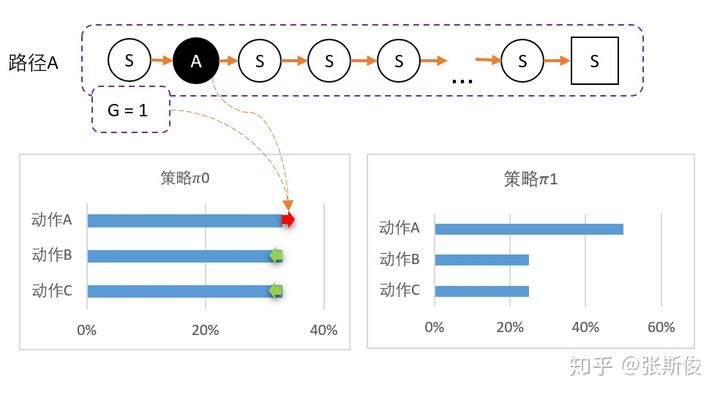
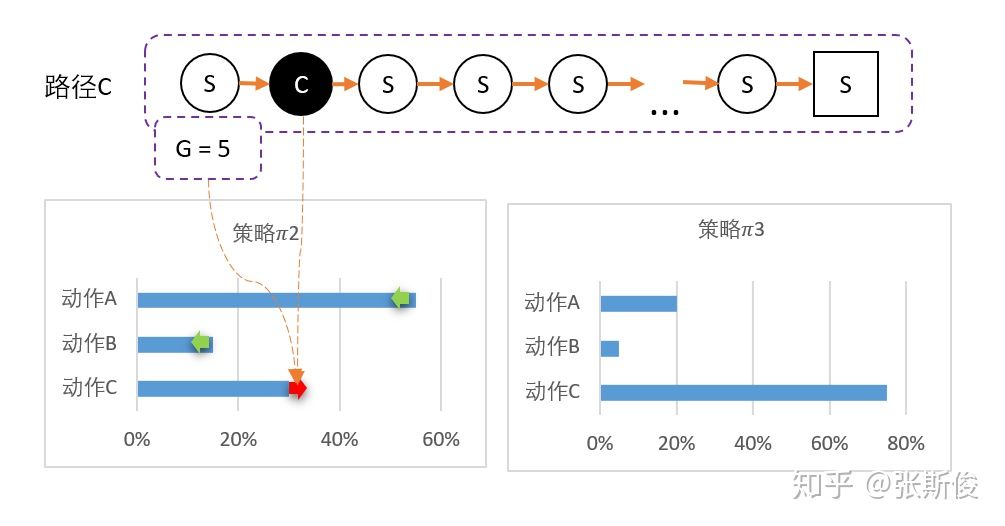
为此,我们可以用带权重的梯度。
我们知道,MC的效率是相对比较低的,因为需要一直走到最终状态。所以我们希望用TD代替MC。那么我们可不可以把PG和DQN结合呢?
注意:这里是一个大坑。个人更倾向于把AC理解成PG的TD版本,而不是PG+DQN。
这是为什么呢?
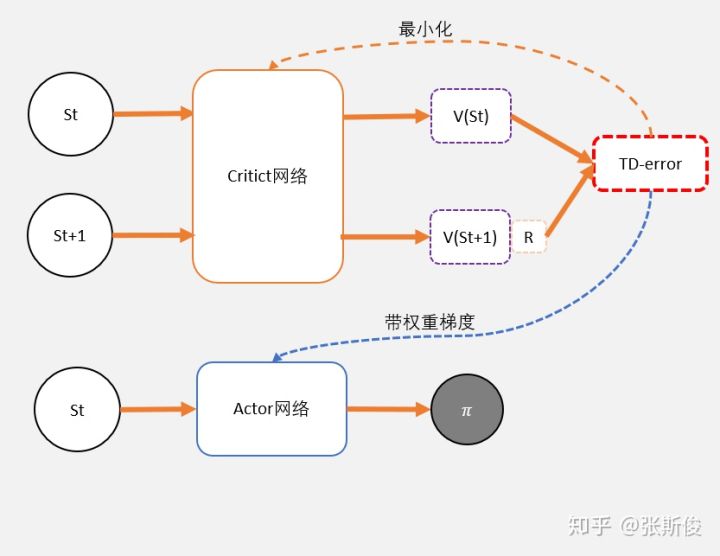
Critic网络负责估算Q值 Actor网络负责估算策略
这不是很完美吗?
但我们要注意,Q值都是正数,容易掉进“正数陷阱”。
假设我们用Critic网络,预估到S状态下三个动作A1,A2,A3的Q值分别为1,2,10。
但在开始的时候,我们采用平均策略,于是随机到A1。于是我们用策略梯度的带权重方法更新策略,这里的权重就是Q值。
于是策略会更倾向于选择A1,意味着更大概率选择A1。结果A1的概率就持续升高...
那要怎么办?我们把Q值弄成有正有负就可以了。一堆数减去他们的平均值一定有正有负吧!Q减去Q的期望值,也就是V值,就可以得到有正有负的Q了。
也就是说Actor用Q(s,a)-V(s)去更新。但我们之前也说过Q和V都要估算太麻烦了。能不能只统一成V呢?
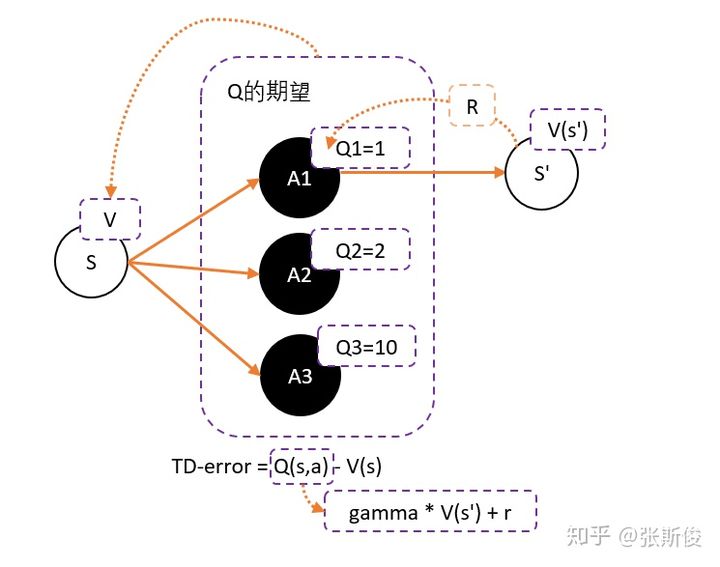
Q(s,a)用gamma * V(s') + r 来代替,于是整理后就可以得到:
gamma * V(s') + r - V(s) —— 我们把这个差,叫做TD-error
这个和之前DQN的更新公式非常像,只不过DQN的更新用了Q,而TD-error用的是V。
眼尖的同学可能已经发现,如果Critic是用来预估V值,而不是原来讨论的Q值。那么,这个TD-error是用来更新Critic的loss了!
所以,强烈建议大家不要把AC看成PG+DQN,而是看成是PG的TD版本。
AC还有个很好的特性,因为我们用两个网络,所以也把连续动作控制型问题解决了。
在强化学习中,数据来自智能体和环境互动。所以,数据都弥足珍贵,我们希望尽量能够利用好每一份数据。
但AC是一个在线策略的算法,也就是行为策略跟目标策略并不是同一个策略。
为了方便讨论,我们先理清楚两个概念: - 行为策略——不是当前策略,用于产出数据 - 目标策略——会更新的策略,是需要被优化的策略
如果两个策略是同一个策略,那么我们称为On Policy,在线策略。如果不是同一个策略,那么Off Policy,离线策略。
这样说有点难以理解,我们举个例子:
如果我们在智能体和环境进行互动时产生的数据打上一个标记。标记这是第几版本的策略产生的数据,例如 1, 2... 10
现在我们的智能体用的策略 10,需要更新到 11。如果算法只能用 10版本的产生的数据来更新,那么这个就是在线策略;如果算法允许用其他版本的数据来更新,那么就是离线策略。
所以,我们需要用到重要性更新的,就可以用上之前策略版本的数据了。
这里也有大坑,因为往上推荐的学习路径都这样,都是先学AC和PPO。再学DDPG,DDPG也是AC框架下的,所以经常会拿DDPG和AC一起比。
但我认为DDPG虽然是AC框架,但我们理解的时候,应该从DQN开始理解。
DDPG就是为了解决DQN连续控制型问题而产生的。
我们之前说,DQN的神经网络就相当于用线把Qtable的状态连起来。那翻到DDPG中,Critic网络就相当于我们用一张布,把整个Qtable的所有柱子都覆盖了。
DDPG的Actor接受输入一个状态,就相当于在这块布切沿着这个状态S切一个面。Actor的任务就是希望在这个面上找寻最高点,也就是最大的Q值。
所以和AC不同,DDPG预估的是Q而不是V。而DDPG的Actor采用的是梯度上升的方式找出最大值。而AC和PPO的Actor采用带权重更新的方法。
学习了DDPG,那么TD3的理解就很简单了。
我们说DDPG源于DQN,DQN有一个大问题,就是高估Q值,所以DDPG也有这个问题。
和DQN一样,我们采用双Q网络,取最小值的方式就可以了。
DDPG用了4个网络,而TD3,用了6个网络。
我们说过,强化学习中,最珍贵就是数据。
A3C和DPPO都使用了“影分身的方式”在最短的时间获取最多的数据,从而让智能体更快地学习。
这有点像一个班长和同学之间的故事。
邪恶的老师给聪明的班长一个任务,让班长一天之内交出一份十万字的莎士比亚全集的读书心得。
这怎么可能?但班长深得班里同学们喜爱。班长决定发动全体同学来完成这个任务。
但怎么分配任务呢?
聪明的班长给每个同学一套莎士比亚全集,然后公布了任务分配的规则:
同学们就随便看任何一个你们感兴趣的段落就可以了,就算是重复了也没关系;
但同学们需要把读过的提炼成心得,每隔一段时间汇报给班长;
班长会负责汇总大家的心得; 但同学提交自己的心得之后,要看一下当前被汇总的最新版本的心得,因为这是集体的智慧,有助于大家提高阅读水平。
最后,班长会把最新版本的心得提交给老师。
邪恶的老师看到这篇凝聚了大众智慧的读书心得,感动得流下泪水。而这位聪明的班长在毕业后投身AI事业,发明出A3C算法。
...故事我编不下去了...
相信大家在这个故事中,已经对A3C和DPPO的思路有个大致的想法。
在A3C中,“同学”不仅要和环境互动,产生数据,而且要自己从这些数据里面学习到“心得”。这里的所谓新的,其实就是计算出来的梯度;需要强调的是,worker向全局网络汇总的是梯度,而不是自己探索出来的数据。
在DPPO中,“同学”会各自看书,然后在书上划重点给“班长”看。这就相当于只提供和环境交互的数据,并不需要自己计算梯度了。

